Aplicaciones típicas
- módulos de máquina compactos
- retrofit con espacio de instalación fijo
- montaje paralelo y en ángulo
- movimientos de elevación con espacio de motor protegido
SP · familia de productos
SP coloca el accionamiento en paralelo o en ángulo respecto al eje. El conjunto se mantiene corto sin renunciar a una tecnología de husillo robusta, sensores y fijaciones adaptadas.
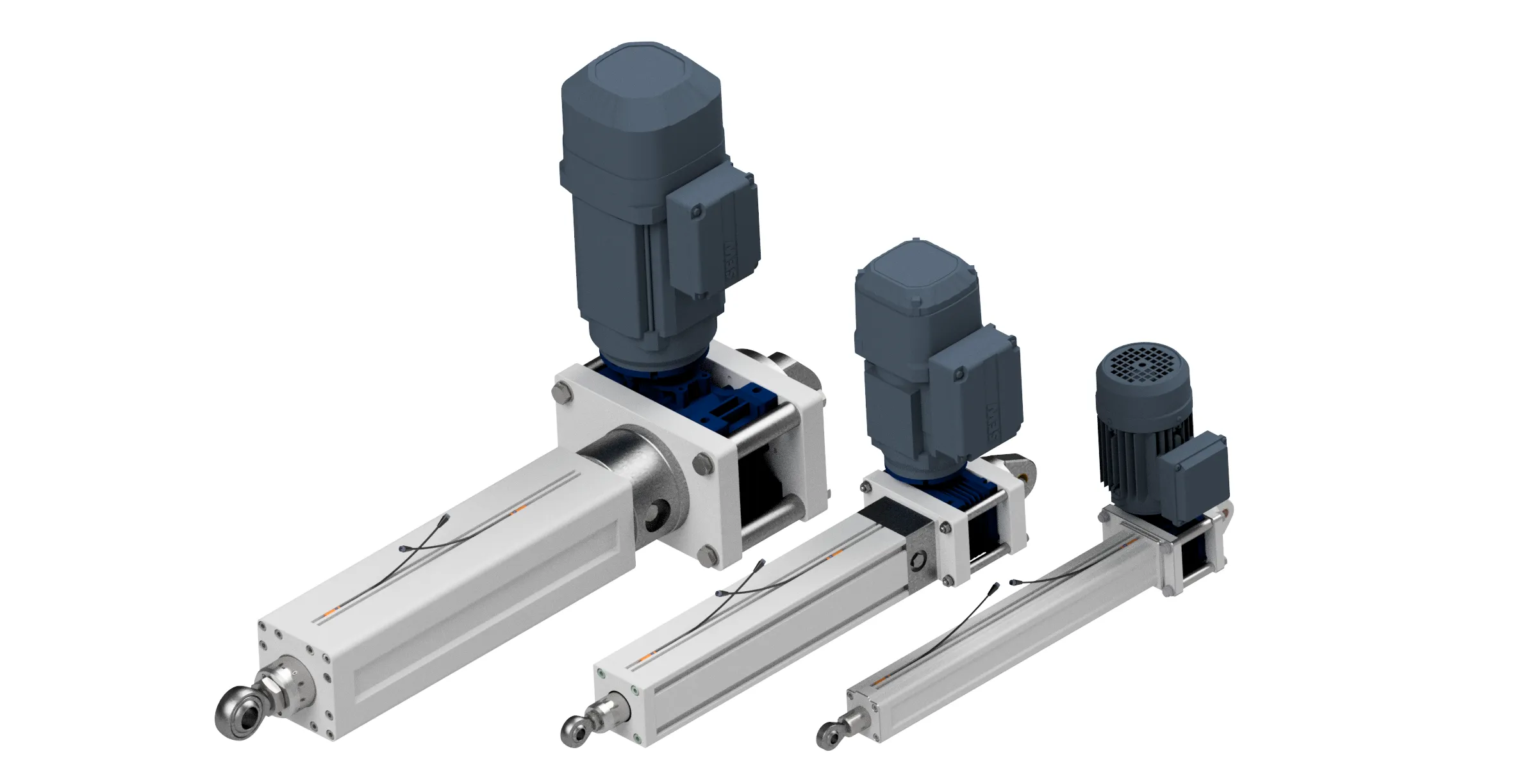
Tamaños y accionamiento
Cinco tamaños por construcción. La carrera y la velocidad resultan de la fuerza de ajuste.
| Tamaño | fuerza máx. |
|---|---|
| 5 | hasta 8 kN |
| 20 | hasta 15 kN |
| 30 | hasta 25 kN |
| 50 | hasta 60 kN |
| 60 | hasta 80 kN |
Para casos pesados y especiales realizamos también fuerzas mucho mayores (hasta ~500 kN) como diseño a medida.
Vista de producto 3D
Gire, acerque y compare disposiciones compactas típicas de la gama SP directamente en el navegador.
Arrastrar para girar · rueda o gesto de pinza para acercar
No se pudo cargar el modelo 3D. La vista estática del producto sigue disponible.
Clasificación
módulos de máquina con espacio axial limitado y requisitos de integración exigentes
Motores y motion control
El actuador lo fabricamos nosotros. El motor que lo acciona lo elige usted – desde el robusto motor trifásico hasta el servoaccionamiento para un motion control exigente.


Es posible el suministro de los servomotores por parte del cliente: usted aporta el motor deseado y nosotros lo integramos en el actuador.
Opciones y variantes
La construcción y el tamaño son solo el comienzo. Fijación, protección, ajuste y acabado se definen según la máquina y el entorno.







Calidad de la consulta
espacio de instalación máximo
posición de motor deseada
fijación y plano existente
fuerza, carrera, velocidad y entorno
Alternativas